Chapter 8: Angular Kinetics
8.1 Static Equilibrium Revisited
Authors: Paul Peter Urone, Roger Hinrichs
Adapted by: Rob Pryce, Alix Blacklin
Learning Objectives
By the end of this section, you will be able to:
- State the first condition of equilibrium.
- Explain static equilibrium.
- Explain dynamic equilibrium.
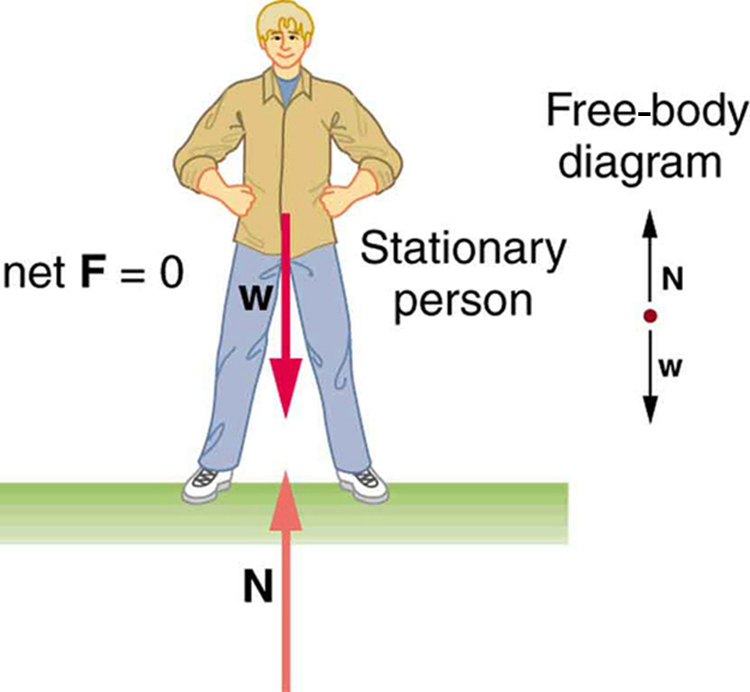
The first condition necessary to achieve equilibrium is the one already mentioned: the net external force on the system must be zero. Expressed as an equation, this is simply
Note that if net [latex]\mathbf{F}[/latex] is zero, then the net external force in any direction is zero. For example, the net external forces along the typical x- and y-axes are zero. This is written as
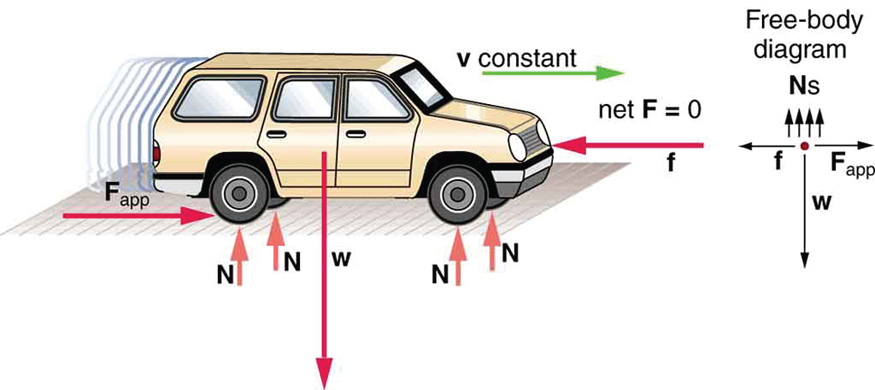
The two figures below illustrate situations where [latex]\text{net}\phantom{\rule{0.25em}{0ex}}\mathbf{F}=0[/latex] for both static equilibrium (motionless), and dynamic equilibrium (constant velocity).
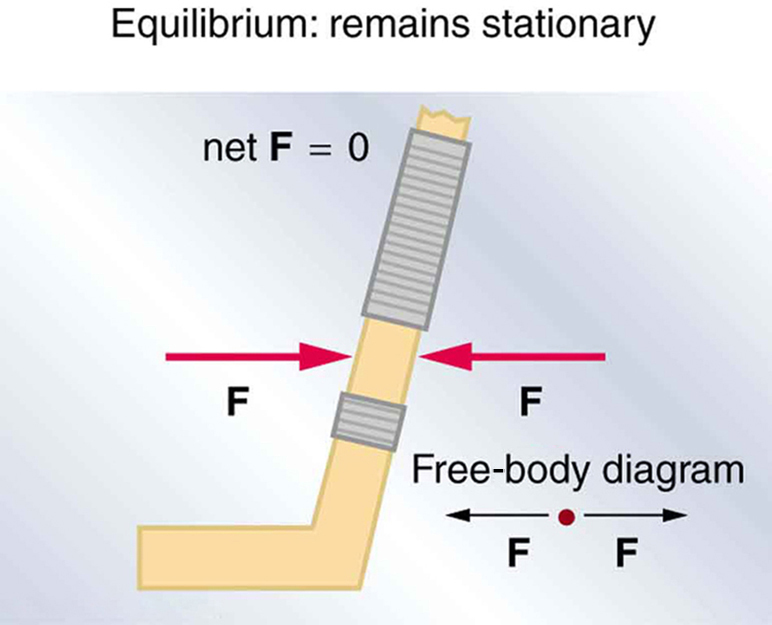
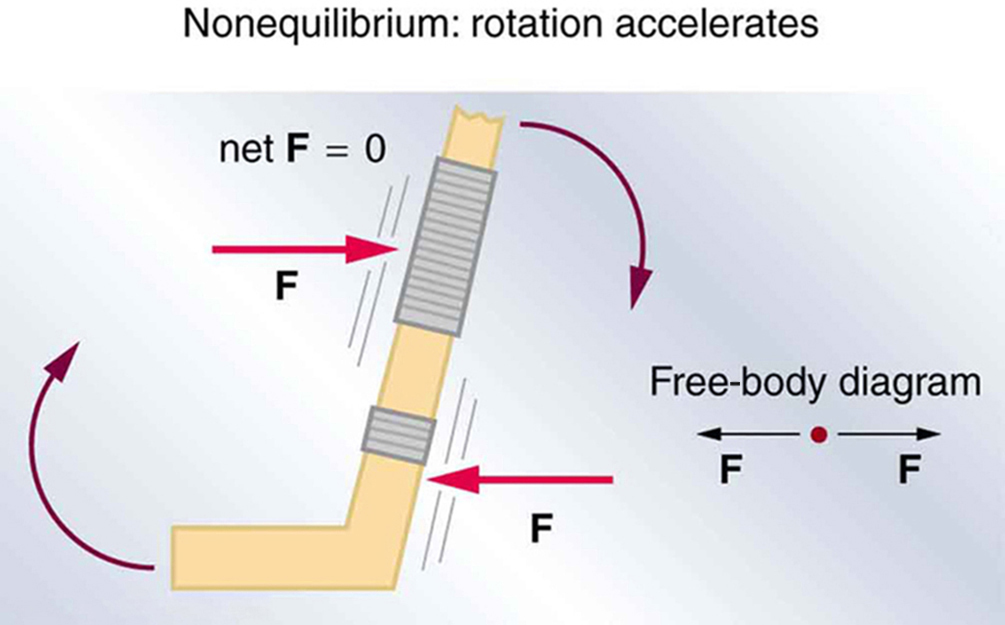
However, it is not sufficient for the net external force of a system to be zero for a system to be in equilibrium. Consider the two situations illustrated in the two figures below, where forces are applied to an ice hockey stick lying flat on ice. The net external force is zero in both situations shown in the figure; but in one case, equilibrium is achieved, whereas in the other, it is not. In the first figure, the ice hockey stick remains motionless. But in the second, with the same forces applied in different places, the stick experiences accelerated rotation. Therefore, we know that the point at which a force is applied is another factor in determining whether or not equilibrium is achieved. This will be explored further in the next section.
PhET Explorations: Torque
Investigate how torque causes an object to rotate. Discover the relationships between angular acceleration, moment of inertia, angular momentum and torque. Click to open media in new browser.
