Chapter 3 Describing Movement in Two Dimensions, 2-D Linear Kinematics
3.3 Adding and Subtracting Vectors: Algebra
Authors: Paul Peter Urone, Roger Hinrichs
Adapted by: Rob Pryce, Alix Blacklin
Learning Objectives
By the end of this section, you will be able to:
- Understand the rules of vector addition and subtraction using analytical methods.
- Apply analytical methods to determine vertical and horizontal component vectors.
- Apply analytical methods to determine the magnitude and direction of a resultant vector.
Analytical methods of vector addition and subtraction employ geometry and simple trigonometry rather than the ruler and protractor of graphical methods. Part of the graphical technique is retained, because vectors are still represented by arrows for easy visualization. However, analytical methods are more concise, accurate, and precise than graphical methods, which are limited by the accuracy with which a drawing can be made. Analytical methods are limited only by the accuracy and precision with which physical quantities are known.
Resolving a Vector into Its Components
Analytical techniques and right triangles go hand-in-hand in biomechanics because (among other things) motions along perpendicular directions are independent. We very often need to separate a vector into its perpendicular components. For example, given a vector like [latex]\vec{A}[/latex] in Figure 3.24, we may wish to find which two perpendicular vectors, [latex]\vec{A_x}[/latex]) and [latex]\vec{A_y}[/latex], add to produce it.
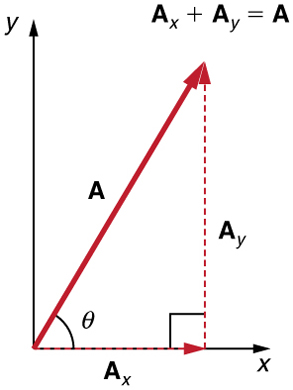
[latex]\vec{A_x}[/latex] and [latex]\vec{A_y}[/latex] are defined to be the components of [latex]\vec{A}[/latex] along the x- and y-axes. The three vectors [latex]\vec{A}[/latex], [latex]\vec{A_x}[/latex], and [latex]\vec{A_y}[/latex] form a right triangle:
[latex]\vec{A_x} + \vec{A_y} = \vec{A}[/latex]
Note that this relationship between components of the vector and the resultant holds only for vector quantities (which include both magnitude and direction). The relationship does not apply for the magnitudes alone. For example, if [latex]\vec{A_x}=\text{3 m east}[/latex], [latex]\vec{A_y}=\text{4 m north}[/latex], and [latex]\vec{A}=\text{5 m north-east}[/latex], then it is true that the vectors [latex]\vec{A_x} + \vec{A_y} = \vec{A}[/latex]. However, it is not true that the sum of the magnitudes of the vectors is also equal. That is,
Thus,
[latex]\textit{A}_x + \textit{A}_y \ne \textit{A}[/latex]
If the vector [latex]\vec{A}[/latex] is known, then its magnitude [latex]\textit{A}[/latex] (its length) and its angle [latex]\theta[/latex] (its direction) are known. To find [latex]\vec{A_x}[/latex] and [latex]\vec{A_y}[/latex], its x- and y-components, we use the following relationships for a right triangle.
[latex]\vec{A_x}=A\phantom{\rule{0.25em}{0ex}}\text{cos}\phantom{\rule{0.25em}{0ex}}\theta[/latex]
and
![]A dotted vector A sub x whose magnitude is equal to A cosine theta is drawn from the origin along the x axis. From the head of the vector A sub x another vector A sub y whose magnitude is equal to A sine theta is drawn in the upward direction. Their resultant vector A is drawn from the tail of the vector A sub x to the head of the vector A-y at an angle theta from the x axis. Therefore vector A is the sum of the vectors A sub x and A sub y.](https://pressbooks.openedmb.ca/app/uploads/sites/10/2022/01/Figure_03_03_02a.jpg)
Suppose, for example, that [latex]\vec{A}[/latex] is the vector representing the total displacement of the person walking in a city considered in the previous two sections.
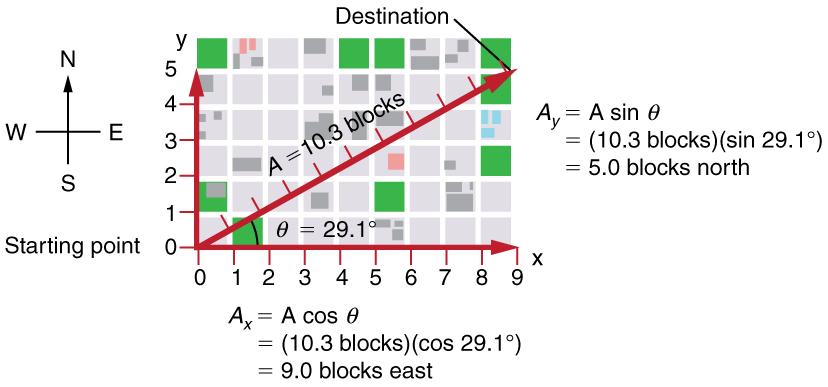
Then [latex]\textit{A}=10.3[/latex] blocks and [latex]\theta =29.1º[/latex] , so that
[latex]\vec{A_x}=A\phantom{\rule{0.25em}{0ex}}\text{cos}\phantom{\rule{0.25em}{0ex}}\theta =\left(\text{10.3 blocks}\right)\left(\text{cos}\phantom{\rule{0.25em}{0ex}}29.1º\right)=\text{9.0 blocks}[/latex]
[latex]\vec{A_y}=A\phantom{\rule{0.25em}{0ex}}\text{sin}\phantom{\rule{0.25em}{0ex}}\theta =\left(\text{10.3 blocks}\right)\left(\text{sin}\phantom{\rule{0.25em}{0ex}}29.1º\right)=\text{5.0 blocks}\text{.}[/latex]
Calculating a Resultant Vector
If the perpendicular components [latex]\vec{A_x}[/latex] and [latex]\vec{A_y}[/latex] of a vector [latex]\vec{A}[/latex] are known, then [latex]\vec{A}[/latex] can also be found by calculation. To find the magnitude [latex]\textit{A}[/latex] and direction [latex]\theta[/latex] of a vector from its perpendicular components [latex]\vec{A_x}[/latex] and [latex]\vec{A_y}[/latex], we use the following relationships:
[latex]\textit{A}=\sqrt{\textit{A}_x^{2}+\textit{A}_y^{2}}[/latex]
[latex]\theta ={\text{tan}}^{-1}\frac{\textit{A}_y}{\textit{A}_x}[/latex]
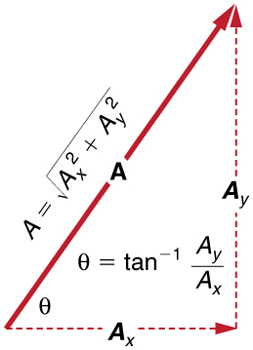
Note that the equation [latex]\textit{A}=\sqrt{\textit{A}_x^{2}+\textit{A}_y^{2}}[/latex] is just the Pythagorean theorem relating the legs of a right triangle to the length of the hypotenuse. For example, if [latex]\vec{A_x}[/latex] and [latex]\vec{A_y}[/latex] are 9 and 5 blocks, respectively, then [latex]\textit{A}=\sqrt{{9}^{2}{\text{+5}}^{2}}\text{=10}\text{.}3[/latex] blocks, again consistent with the example of the person walking in a city. Finally, the direction is [latex]\theta ={\text{tan}}^{–1}\left(\text{5/9}\right)=29.1º[/latex] , as before.
Determining Vectors and Vector Components with Analytical Methods
Equations [latex]\textit{A}_x=\textit{A}\phantom{\rule{0.25em}{0ex}}\text{cos}\phantom{\rule{0.25em}{0ex}}\theta[/latex] and [latex]\textit{A_y}=A\phantom{\rule{0.25em}{0ex}}\text{sin}\phantom{\rule{0.25em}{0ex}}\theta[/latex] are used to find the perpendicular components of a vector—that is, to go from it's magnitude, [latex]\textit{A}[/latex], and direction, [latex]\theta[/latex], to its components, [latex]\textit{A}_x[/latex] and [latex]\textit{A}_y[/latex].
Equations [latex]\textit{A}=\sqrt{\textit{A_x}^{2}+\textit{A_y}^{2}}[/latex] and [latex]\theta ={\text{tan}}^{\text{–1}}\left(\textit{A}_y/\textit{A}_x\right)[/latex] are used to find a vector from its perpendicular components—that is, to go from [latex]\textit{A}_x[/latex] and [latex]\textit{A}_y[/latex] to [latex]\textit{A}[/latex] and [latex]\theta[/latex].
Both processes are crucial to analytical methods of vector addition and subtraction.
Adding Multiple Vectors Using Analytical Methods
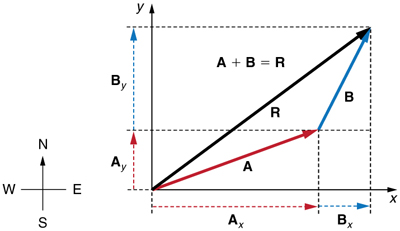
To see how to add vectors using perpendicular components, consider Figure 3.28, in which the vectors [latex]\vec{A}[/latex] and [latex]\vec{B}[/latex] are added to produce the resultant [latex]\vec{R}[/latex].
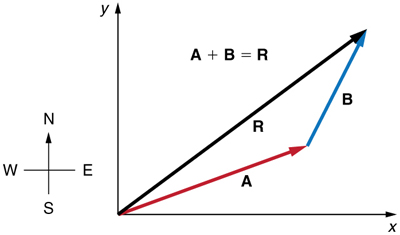
If [latex]\vec{A}[/latex] and [latex]\vec{B}[/latex] represent two legs of a walk (two displacements), then [latex]\vec{R}[/latex] is the total displacement. The person taking the walk ends up at the tip of [latex]\vec{R}[/latex]. There are many ways to arrive at the same point. In particular, the person could have walked first in the x-direction and then in the y-direction. Those paths are the x- and y-components of the resultant, [latex]\vec{R}_x[/latex] and [latex]\vec{R}_y[/latex].
If we know [latex]\vec{R}_x[/latex] and [latex]\vec{R}_y[/latex], we can find [latex]\textit{R}[/latex] and [latex]\theta[/latex] using the equations:
[latex]\textit{A}=\sqrt{\textit{A}_x^{2}+\textit{A}_y^{2}}[/latex] and
[latex]\theta ={\text{tan}}^{–1}\left(\textit{A}_y/\textit{A}_x\right)[/latex].
When you use the analytical method of vector addition, you can determine the components or the magnitude and direction of a vector.
Step 1. Identify the x- and y-axes that will be used in the problem. Then, find the components of each vector to be added along the chosen perpendicular axes. Use the equations:
[latex]\textit{A}_x=A\phantom{\rule{0.25em}{0ex}}\text{cos}\phantom{\rule{0.25em}{0ex}}\theta[/latex] and
[latex]\textit{A}_y=A\phantom{\rule{0.25em}{0ex}}\text{sin}\phantom{\rule{0.25em}{0ex}}\theta[/latex] to find the components.
In Figure 3.29, these components are [latex]\textit{A}_x[/latex], [latex]\textit{A}_y[/latex], [latex]\textit{B}_x[/latex], and [latex]\textit{B}_y[/latex]. The angles that vectors [latex]\vec{A}[/latex] and [latex]\vec{B}[/latex] make with the x-axis are [latex]\theta_A[/latex] and [latex]\theta_B[/latex], respectively.
Step 2. Find the components of the resultant along each axis by adding the components of the individual vectors along that axis. That is, as shown in Figure 3.30,
[latex]\textit{R}_x=\textit{A}_x+\textit{B}_x[/latex]
and
[latex]\textit{R}_y=\textit{A}_y+\textit{B}_y[/latex]
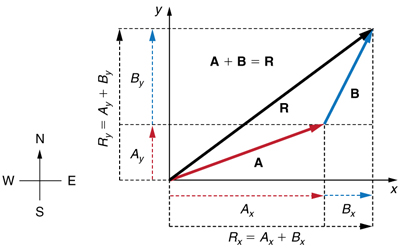
Components along the same axis, say the x-axis, are vectors along the same line and, thus, can be added to one another like ordinary numbers. The same is true for components along the y-axis. (For example, a 9-block eastward walk could be taken in two legs, the first 3 blocks east and the second 6 blocks east, for a total of 9, because they are along the same direction.) So resolving vectors into components along common axes makes it easier to add them. Now that the components of [latex]\vec{R}[/latex] are known, its magnitude and direction can be found.
Step 3. To get the magnitude [latex]\textit{R}[/latex] of the resultant, use the Pythagorean theorem:
[latex]\textit{R}=\sqrt{\textit{R}_x^{2}+\textit{R}_y^{2}}\text{.}[/latex]
Step 4. To get the direction of the resultant:
[latex]\theta ={\text{tan}}^{-1}\left(\textit{R}_y/\textit{R}_x\right)\text{.}[/latex]
The following example illustrates this technique for adding vectors using perpendicular components.
Example: Adding Multiple Vectors Using Analytical Methods
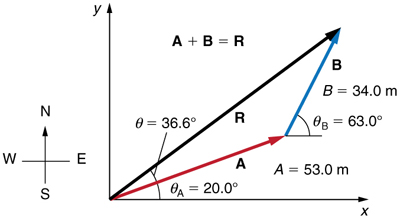
Add the vector [latex]\vec{A}[/latex] to the vector [latex]\vec{B}[/latex] shown in Figure 3.31, using perpendicular components along the x- and y-axes. The x- and y-axes are along the east–west and north–south directions, respectively. Vector [latex]\vec{A}[/latex] represents the first leg of a walk in which a person walks 53.0 m in a direction 20.0º north of east. Vector [latex]\vec{B}[/latex] represents the second leg, a displacement of 34.0 m in a direction 63.0º north of east.
Strategy
The components of [latex]\vec{A}[/latex] and [latex]\vec{B}[/latex] along the x- and y-axes represent walking due east and due north to get to the same ending point. Once found, they are combined to produce the resultant.
Solution
Following the method outlined above, we first find the components of [latex]\vec{A}[/latex] and [latex]\vec{B}[/latex] along the x- and y-axes. Note that
[latex]\textit{A} = \text{53.0 m}[/latex],
[latex]\theta_A=20.0º[/latex],
[latex]\textit{B}=\text{34.0 m}[/latex], and
[latex]\theta_B=\text{63.0º}[/latex].
We find the x-components by using [latex]\textit{A}_x=\textit{A}\phantom{\rule{0.25em}{0ex}}\text{cos}\phantom{\rule{0.25em}{0ex}}\theta[/latex], which gives:
Similarly, the y-components are found using [latex]{A}_{y}=A\phantom{\rule{0.25em}{0ex}}\text{sin}\phantom{\rule{0.25em}{0ex}}{\theta }_{A}[/latex]
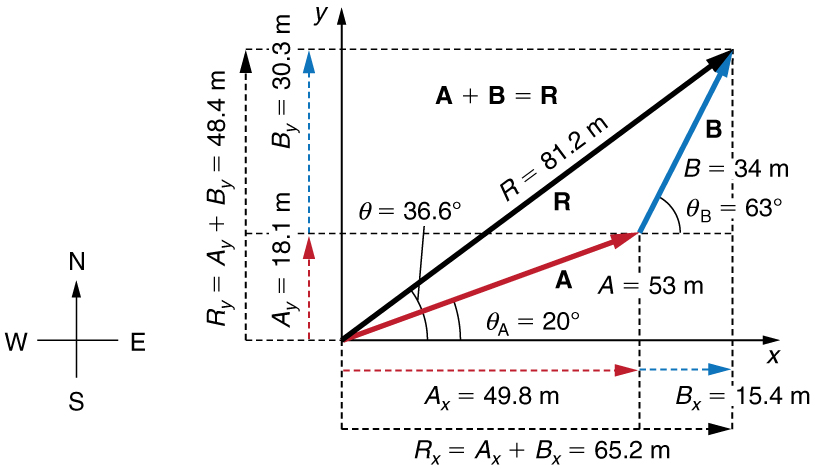
[latex]\begin{array}{lll}{A}_{y}& =& A\phantom{\rule{0.25em}{0ex}}\text{sin}\phantom{\rule{0.25em}{0ex}}{\theta }_{A}=\left(\text{53}\text{.}0 m\text{}\right)\left(\text{sin 20.0º}\right)\\ & =& \text{}\left(\text{53}\text{.}0 m\text{}\right)\left(0\text{.}\text{342}\right)=\text{18}\text{.}1 m\text{}\end{array}[/latex]
and
The x- and y-components of the resultant are thus
Finally, we find the direction of the resultant:
[latex]\theta ={\text{tan}}^{-1}\left({R}_{y}/{R}_{x}\right)\text{=}{\text{tan}}^{-1}\left(\text{48}\text{.}4/\text{65}\text{.}2\right)\text{.}[/latex]
Thus,
Discussion
This example illustrates the addition of vectors using perpendicular components. Vector subtraction using perpendicular components is very similar—it is just the addition of a negative vector.
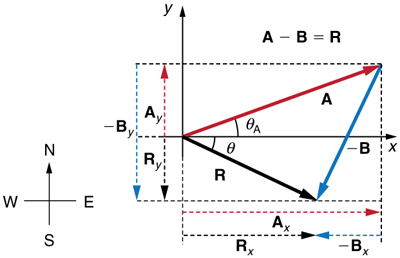
Subtraction of vectors is accomplished by the addition of a negative vector. That is, [latex]\vec{A}-\vec{B}\equiv \vec{A}+\left(\vec{–B}\right)[/latex]. Thus, the method for the subtraction of vectors using perpendicular components is identical to that for addition. The components of [latex]\vec{–B}[/latex] are the negatives of the components of [latex]\vec{B}[/latex].
The x- and y-components of the resultant [latex]\vec{A}-\vec{B} =\vec{R}[/latex]) are thus
and
and the rest of the method outlined above is identical to that for addition. (See Figure 3.33)
Analyzing vectors using perpendicular components is very useful in many areas of biomechanics, because perpendicular quantities are often independent of one another. The next module, Projectile Motion, is one of many in which using perpendicular components helps make the picture clear and simplifies the underlying biomechanics.
PhET Explorations: Vector Addition
Learn how to add vectors. Drag vectors onto a graph, change their length and angle, and sum them together in this simulation. The magnitude, angle, and components of each vector can be displayed in several formats.
